William Harwin

Professor of Interactive & Human Systems at the University of Reading.
Location Reading
Activity
-
William Harwin made a comment
Robots are 'embodied' machines meaning they can both sense and change their environments. If you are looking for a PhD, I suggest you look for an area that will enable both (even if it is in simulation). So deep learning by itself is not very interesting, but deep learning where the robot can use information to react or predict to the world, may provide a very...
-
William Harwin replied to Erica Romska
Some part of the machine's intelligence comes from its mechanical configuration. This is an idea that Rolf Pfeifer at U. Zurich calls affordance. The backtracking and the missing of the light is due to the light sensor looking in the wrong direction,
-
William Harwin replied to Alan Clark
You are right about the binomial name, and the name should be in italics. So far as I know there is only one species, maybe there is an opportunity to discover (and hence name) more.
-
William Harwin replied to Alan Clark
Valentino Braitenberg's book is available at http://www1.appstate.edu/~kms/classes/psy5150/Documents/Braitenberg1984.pdf
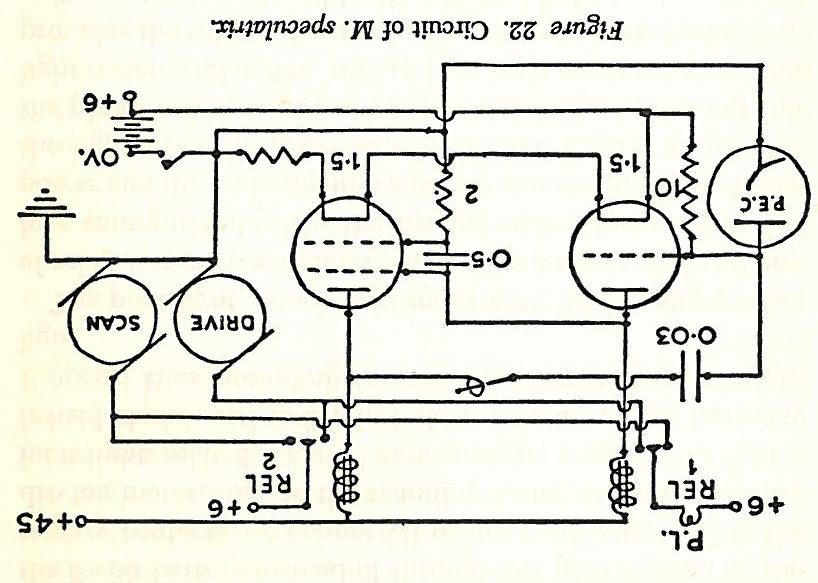
I have a picture of the brain of M. speculatrix available at
http://www.personal.reading.ac.uk/~shshawin/LN/images/M.speculatrix.jpg
There is also a video at
https://www.youtube.com/watch?v=lLULRlmXkKo -
William Harwin replied to Teresa Holmes
M. speculatrix is a very simple machine. Simulations such as the one shown tend to not have any external noise so behaviours are in some sense 'pure'. Any practical robot will have other factors contributing to its movement, such as the amount of oil in the bearings, other light sources and light reflections, etc so will have a more varied response to the...
-
William Harwin replied to Romina Pouyamehr
I am speculating here... but I suspect that when M. speculatrix was fully charged, it could not distinguish between bright and dim lights so was attracted to any light. As the battery voltages dropped then the lower intensity lights would have been missed. It will also have been helped by the fact that the light in the charging hutch was at the back so would...
-
William Harwin replied to Evvan Land
Should run on both, and I believe there is a windows executable included. Please let me know if you have problems.
-
There is a great deal of interest in making robots look and interact like humans for a variety of reasons. Work by Prof Kerstin Dautenhahn requires robots to look humanoid so as to explore how humans are likely to interact, a research area that has immediate relevance to issues such as autism. Some research in Japan has been very humanoid focussed, but Prof K...
-
In the example of Braitenberg vehicle Predator-Prey systems, the decision is not binary, it is effectively a summation of two responses, 'find food' or 'run away' and is entirely conditioned on the immediate environment, ie run away if the predator is near by. Several people have mentioned learning in this domain and that would be possible. Learning could be...
-
William Harwin replied to Brian Gubbins
Brian,
If you go to
http://www.personal.reading.ac.uk/~shshawin/LN/braitenberg.html
you can find two different versions compiled for Microsoft windows machines. You should be able to get one to run, but you will need to unzip the components. (This is an older version, I will see if I can find time to compile the newer version next week) -
William Harwin replied to Luc Grondin
I am having difficulty updating the git repository. In the interim, below is frthe updated readme.
# User interface
This is not a particularly friendly interface. This is a consequence of the deci
sion so as to keep
the code as simple as possible, and allow it to run on multiple
platforms. OpenGL and Glut are the two libraries (other than... -
William Harwin replied to Colin Gearon
The eyes of M. Speculatrix and the Braitenberg vehicles are identical. The difference in their behaviours is largely due to the configuration of the two robots. Robert Last is correct in his analysis of M.Speculatrix, it spins its eye until it sees light where upon it stops the spin and moves forward, and this results in this ideosyncratic movement. The...
-
William Harwin replied to Luc Grondin
Try positioning the mouse and typing 'a'
That should add a light (a cube)
you can then change this to a Braitenberg vehicle with a command such as 'LS' for light seeker. -
William Harwin replied to Brian Gubbins
In addition to git-hub you can get it from my website
www.reading.ac..uk/~shshawin/LN/braitenberg_v032.zip (although give me a clue as to what happens when you try to access from git since it should be there)
On
https://github.com/WSHarwin/Neuron-vehicles
There is a 'download' button at the bottom of the right most column.

{kind=link}